“Meh.”
Au milieu de l’engouement général que suscitent les technologies de la 3D, il en est une qui se heurte encore bien souvent à l’indifférence du public :
Le scan tridimensionnel.
Loin d’en mettre plein la vue, un scanner pourrait presque sembler anecdotique à côté, par exemple, d’un casque de réalité augmentée. Ou d’une voiture autonome. Ou bien encore d’un métavers.
Pourtant, sans cet outil primordial, rien de tout cela ne serait possible.
Focus sur une technologie qui transforme les objets réels en modèles virtuels, et les rêves en réalité.
Représenter le réel dans toutes ses dimensions
Des peintures rupestres de la Préhistoire jusqu’aux chefs d’œuvres de la Renaissance, l’homme n’a cessé de perfectionner son talent pour représenter le réel. À travers les âges, cette obsession a autant marqué les arts que la recherche scientifique.
Quoi de plus étonnant, puisque c’est là l’une des fonctions primordiales du cerveau ? À chaque instant, ce dernier déploie des trésors d’ingénierie pour nous offrir une image aussi cohérente que possible du monde, dans tous ses reliefs et toute sa profondeur. En trois dimensions.
Et au terme de milliers d’années de progrès scientifiques, nos technologies sont enfin en mesure de reproduire ce processus à l’identique, ou presque.
De la MMT à la Télémétrie
Avant l’arrivée du virtuel, et depuis l’antiquité romaine, la seule alternative pour capturer un objet dans ses trois dimensions était le moulage au plâtre. Avec toutes les limites matérielles qui l’accompagnent.
1986 - La Machine à Mesurer Tridimensionnelle


C’est à la fin des années 1950 et au début des années 1960 que les premières machines à mesurer tridimensionnelles (MMT) à trois axes sont apparues sur le marché. Mais ce n’est qu’au milieu des années 1980, que des MMT portables dotées de bras de mesure ont été inventé.Et par des Français.
Avec un design qui n’est pas sans rappeler celui de la machine à coudre, celle-ci est équipée d’une sorte d’aiguille qui vient “palper” la surface de l’objet. Par de très légers à-coups, millimètre par millimètre, elle mesure un par un le moindre relief, afin de constituer une image 3D complète.
Mais la MMT (pour les intimes) reste encore limitée par de nombreuses contraintes matérielles. Son plein potentiel ne sera révélé que plus tard, grâce à la télémétrie. Une technologie, pourtant, pas si récente que ça.
1821 - La Télémétrie
Retour au début du XIXème siècle.
Sept ans seulement après l’invention du premier mètre-ruban en 1814, se déroule déjà celle du premier Télémètre. Grâce, encore une fois, à un ingénieur français.
L’outil a alors recours au son, et plus précisément à la vitesse du son, pour déduire la distance entre deux objets… à distance.
Comme le font les chauve-souris, avec leur fameuse écholocation.

1915 - Le Sonar
Ou comme le font les sous-marins, avec leur fameux Sonar. Basé sur la technologie du télémètre acoustique, ce dernier est inventé pendant la Première Guerre mondiale et utilise, comme son nom l’indique, le son.


1935 - Le Radar


Viendra plus tard le non moins célèbre Radar, qui est, comme son nom l’indique à nouveau, un télémètre radio. Et qui connaîtra à son tour ses heures de gloire durant la Seconde Guerre mondiale, …
Ainsi que sur les routes de France !
1962 - Le Lidar
Jamais deux, sans trois. À l’occasion de la Guerre Froide, se développe finalement le lidar. Un télémètre qui utilise une nouvelle technologie, aujourd’hui bien connue des fans de Star Wars : le laser !
Élément clé de la plupart des scanners 3D modernes, le LiDAR acronyme de « LIght Detection And Ranging » ou « Laser Imaging Detection And Ranging » (« détection et estimation de la distance par la lumière » ou « par laser ») permet de mesurer des distances bien plus larges, avec une précision inégalée.
Dès 1962, celui-ci sert par exemple à mesurer, au centimètre près… la distance entre la Terre et la Lune.
En pleine course à l’espace, il joue ainsi un rôle crucial pour la réussite du programme Apollo. Après avoir aidé l’homme à faire son premier pas sur la Lune en 1969, le lidar sert ensuite à cartographier pour la première fois les reliefs de sa surface en 1971.


Ce sont les premiers pas du scan 3D.
Scanner à la vitesse de la lumière
Mais comment un télémètre, qui ne sert qu’à mesurer la distance entre deux objets, permet-il de scanner un objet en trois dimensions ?
En reprenant, tout simplement, le principe de la machine à mesurer tridimensionnelle. Une par une, le télémètre mesure la distance des moindres aspérités de l’objet, pour finalement constituer un nuage de points reproduisant sa surface en trois dimensions.
Point par point. Mais à une vitesse pouvant aller jusqu’à…
100 000 points par seconde
Rien que ça.
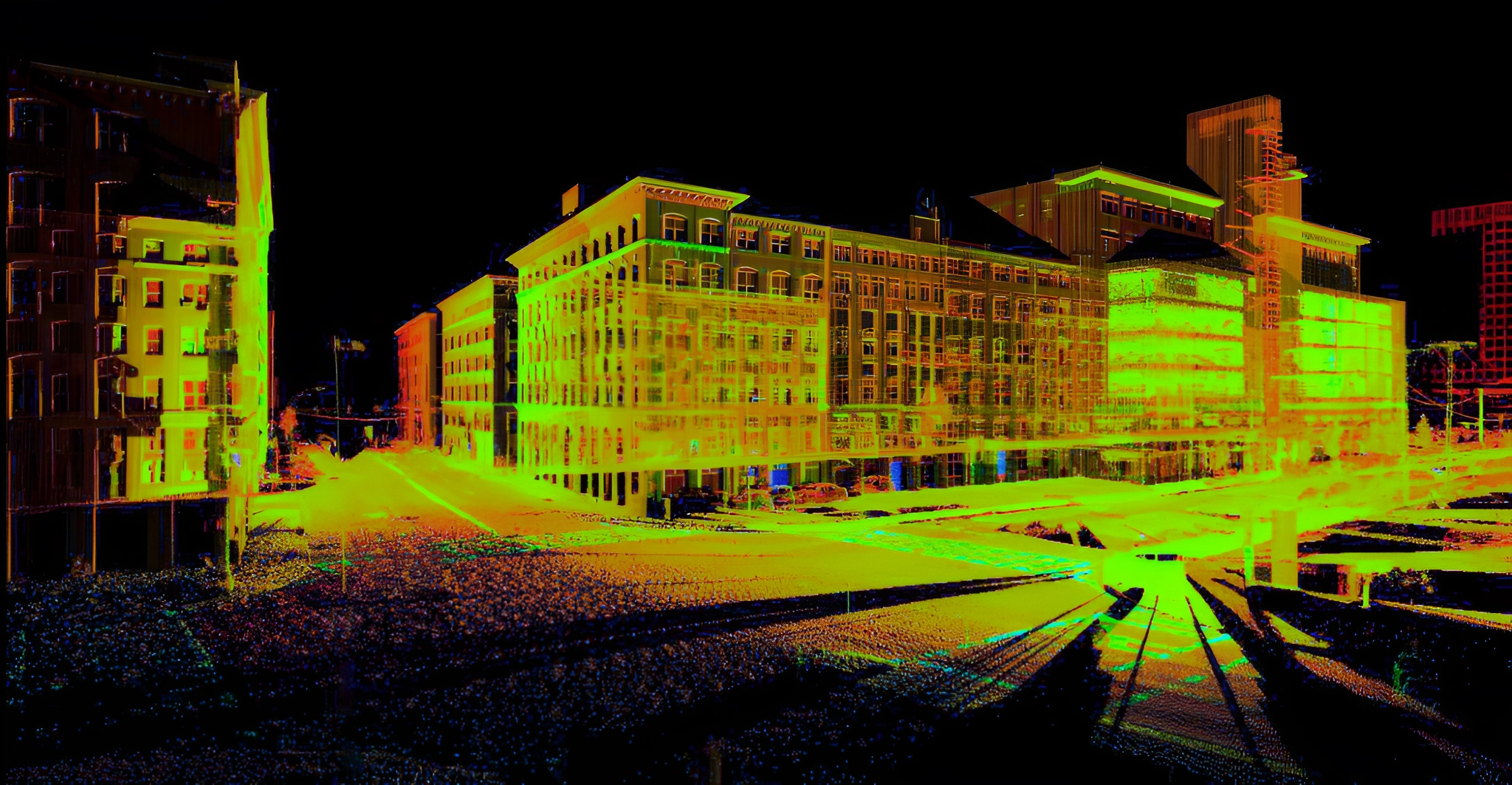
C’est ce qu’on appelle un scanner par temps de vol, particulièrement utilisé pour la cartographie de terrains ou de bâtiments.
Le “temps de vol” ou ToF (Time of Flight) désigne ici le temps que met la lumière du laser pour revenir à son point de départ. À partir de la vitesse de la lumière, on peut ainsi déduire la distance à laquelle se trouve l’objet.
Mais ce qui fait sa force, fait aussi sa faiblesse. Car la vitesse de la lumière, à près de 300 millions de mètres par seconde, est bien trop rapide.
Sa mesure est complexe, et ne permet d’offrir qu’une précision au
millimètre près. Ce qui est déjà un exploit, car il ne faut que 3,3
picosecondes à la lumière pour parcourir un millimètre.
3.3 millièmes de milliardième de seconde
C’est tout.
Ce type de scanner est donc utilisé sur de grandes distances, allant du mètre à plusieurs kilomètres.
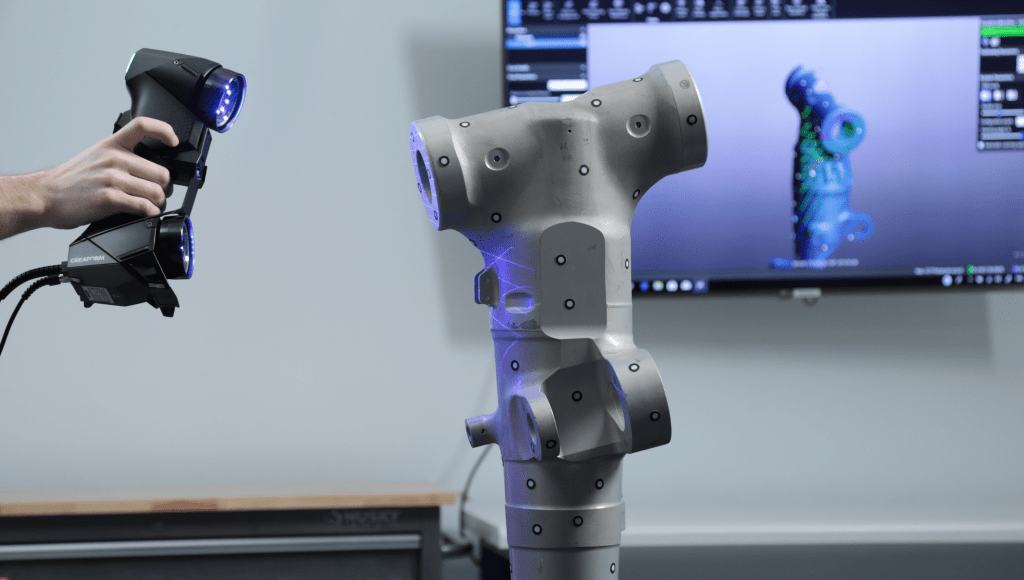
On lui préfèrera, pour les objets de plus petite taille, le scanner par triangulation.
Reprenant le même principe, ce dernier obtient une précision dix fois plus élevée, en croisant les données du laser avec celles d’un appareil photo.
Croiser deux outils de mesure permet ainsi de trianguler la position d’un point sur l’objet, grâce à un algorithme qui rendrait presque jaloux Pythagore et son théorème.
Croiser toujours plus de données
Plus l’on croise de données différentes, plus le scan est précis. Ainsi, les scanners sont de plus en plus souvent équipés de GPS, altimètres, gyromètres… et plus si affinités.
C’est notamment le cas avec l’arrivée des scanners dits “mobiles”. Équipés sur des humains, des drones, ou même des robots, ceux-ci ont pour nouvelle contrainte de compenser les interférences liées au mouvement.
Scanner en mouvement
C’est notamment le cas avec l’arrivée des scanners dits “mobiles”. Équipés sur des humains, des drones, ou même des robots, ceux-ci ont pour nouvelle contrainte de compenser les interférences liées au mouvement.
Car en plus de la distance de l’objet, ils doivent mesurer en temps réel leurs déplacements dans l’espace.
Mais ça ne s’arrête pas là. À l’échelle de la vitesse de la lumière, la moindre interférence prend des proportions démesurées.
En particulier sur un scan haute résolution, qui peut durer jusqu’à plusieurs minutes.
Un chat qui passe, ou ne serait-ce qu’une vibration, peut alors se traduire par de véritables aberrations dans notre fameux nuage de points…

Nuages de polygones


Fort heureusement, des algorithmes sont aujourd’hui en mesure de nettoyer ces incohérences.
Les points sont ensuite reliés numériquement entre eux, par un processus appelé maillage, afin de former un modèle 3D polygonal. Un polygone, qui compte des millions d’angles différents.
Enfin, il est de plus en plus courant de croiser les données de plusieurs scanners afin d’obtenir un modèle complet.
Exemple avec un bâtiment :
– Un scanner par temps de vol permet de scanner la surface extérieure du bâtiment.
– Un humain équipé d’un scanner mobile, sur un chariot par exemple, scanne tout l’intérieur, pièce par pièce.
– Un drone capture ensuite la vue d’ensemble, depuis un point de vue inaccessible pour n’importe quel autre scanner.
Précision vs. instantanéité
Précédemment, la recherche de précision c’était le Graal, oui mais quid de l’instantanéité ? C’est bien de vouloir un modèle 3D le plus fidèle pour disposer d’une version virtuelle la plus réaliste possible. Mais on a pas toujours le temps, dans le cadre de la vision 3D par exemple ou dans la vision par ordinateur on a plus besoin d’instantanéité que de précision.
On revient sur le principe de croisement, dans le domaine de la vision 3D, il a donné naissance au scanner stéréoscopique. Faisant fi du laser, ce dernier croise simplement les données de deux caméras. Il crée ainsi une image en 3D, à partir de deux images en 2D.


2D + 2D = 3D
C’est ce qu’on appelle la parallaxe. Et c’est ainsi que fonctionne, accessoirement, la vision humaine. Car nos deux yeux voient en 2D. C’est notre cerveau qui crée ensuite la 3D. Et il le fait en temps réel.
Moins évidente pour une machine, cette méthode prometteuse a pour désavantage d’exiger des algorithmes complexes, une importante puissance de calcul… et le temps de calcul qui va avec.
Scanner en temps réel
À l’inverse, la caméra par temps de vol (ToF), se base elle aussi sur la lumière mais privilégie l’instantanéité au détriment de la précision.
Au lieu de scanner point par point, et donc d’envoyer une multitude d’impulsions de lumière à hautes fréquences, la caméra ToF émet un éclair de lumière infrarouge plutôt qu’un laser, pour capter l’image 3D d’un objet dans son intégralité.


💡 Différence entre « scanner » et « caméra » par temps de vol
Bien que les deux technologies utilisent le principe du temps de vol (ToF) pour mesurer la distance, les scanners par temps de vol sont généralement des dispositifs autonomes conçus pour capturer des données 3D détaillées, tandis que les caméras par temps de vol sont souvent intégrées à des caméras conventionnelles pour fournir des données de profondeur en temps réel.
NB : Le LiDAR peut utiliser plusieurs caméras ToF pour créer des «cartes ponctuelles» pour l’instantanéité.
Si le résultat obtenu par la caméra ToF est insuffisant pour être vraiment exploité dans la réalisation un modèle 3D, il s’avère en revanche crucial pour l’IA.
Car sans elle, l’IA resterait tout simplement aveugle.
La caméra par temps de vol permet, par exemple, à une voiture autonome d’avoir une vision en temps réel de son environnement.
Ou à un humain d’interagir de manière intuitive avec une machine, qui capte ses mouvements en temps réel.
Un enjeu clé dans le développement d’interfaces hommes-machine fluides pour l’industrie 4.0 et la réalité augmentée.
Au croisement des réalités
Imaginez. Pouvoir interagir avec des objets virtuels d’un simple mouvement, comme avec votre environnement réel. Réalité augmentée, réalité virtuelle, réalité mixte… Les possibilités deviennent infinies.
Car loin d’être un gadget, le scan 3D offre à nos machines un sens essentiel : la vue.
Et ce faisant, il promet de donner un nouveau sens à notre avenir.
Encore en pleine croissance, cette technologie voit son marché doubler chaque année.
Elle ne fait d’ailleurs que commencer à se démocratiser auprès du grand public, qui ignore bien souvent son rôle déjà omniprésent : FaceID sur l’iPhone, conduite autonome des Tesla, filtres Snapchat…
Le scan 3D est un pont au croisement de l’univers réel et de l’univers virtuel. Ne passez pas à côté.
Quelle est l’offre de VIRTUAL SR en la matière ?
Des Solutions bien réelles
En pratique, la Scan 3D peut s’avérer très gourmand en ressources.
La quantité de données à traiter, la complexité des calculs impliqués, la nécessité de maintenir une haute résolution et précision, ainsi le temps nécessaire pour effectuer le traitement, y contribuent largement.
Il faut donc être en capacité de disposer à la fois d’une architecture informatique solide et des ressources adaptées aux besoins du Scan 3D (puissance, vitesse, capacité, faible latence… ) pour garantir des performances optimales.
Notre objectif vise à vous faire exploiter la puissance de notre plateforme et de nos bureaux virtuels 3D pour réduire les temps d’attente, améliorer le traitement des données (en volume, en intensité et en temps), les calculs complexes, la visualisation en temps réel, tout en offrant des avantages de d’évolutivité et de flexibilité considérables.
L’intégration de solutions de scan en 3 dimensions sur une architecture virtuelle personnalisée en cloud, avec des bureaux virtuels 3D haute performance, offre de nombreuses opportunités pour améliorer l’expérience procurée par les technologies liées au Scan 3D.
Disposer d’une Plateforme optimisée pour les technologies de Scan 3D permettant :
Le Traitement rapide des données : permet la gestion de grandes quantités de données, intensifie le traitement des données et réduit ainsi les temps d’attente.
Le Traitement en temps réel : favorise le traitement en temps réel des données de scan 3D, ce qui est particulièrement important dans des applications telles que la réalité augmentée ou le contrôle de qualité en ligne de production.
Les Calculs complexes : s’exécutent de manière optimale, ce qui permet d’obtenir des résultats plus rapidement et avec une plus grande précision.
Certaines étapes du processus de scan 3D, telles que l’alignement de plusieurs scans ou la reconstruction de modèles 3D complexes, impliquent des calculs intensifs.
La Visualisation en temps réel : permet aux utilisateurs d’explorer rapidement les modèles 3D et de détecter d’éventuelles erreurs ou imperfections pendant le processus de numérisation.
L’Évolutivité : prendre en charge ces nouvelles technologies, permettant ainsi aux utilisateurs de rester à jour avec les dernières avancées.
Le Traitement des données : Services de traitement de données de scan 3D, y compris des outils d’analyse, de segmentation, de modélisation et de reconstruction pour tirer pleinement parti des données de scan 3D en extrayant des informations utiles et en créant des modèles 3D précis.
Stockage extensible : augmenter ou réduire leur capacité de stockage en fonction de leurs besoins, ce qui permet une gestion flexible et économique des données de scan 3D.
Archivage intelligent : Les données de scan 3D peuvent être archivées de manière intelligente en fonction de leur fréquence d’accès et de leur importance ce qui permet de libérer de l’espace de stockage pour les données plus récentes et plus pertinentes.
Traitement distribué : En répartissant les charges de travail sur plusieurs serveurs, ces solutions peuvent accélérer le traitement des données, réduisant ainsi les délais et les coûts associés.
Le Calcul haute performance : accélérer le traitement des données de scan 3D. Ces ressources peuvent être utilisées pour exécuter des simulations, des analyses de données complexes et des rendus 3D à grande échelle.
Intégration avec des outils logiciels : intégrer des logiciels de conception, de modélisation, de visualisation et d’analyse 3D. Travailler de manière transparente avec les données et les outils logiciels usuels du quotidien.
Sécurité et conformité : pour protéger les données de scan 3D contre les menaces internes et externes. Se conformer aux réglementations en matière de protection des données et de confidentialité, telles que le RGPD.
Formation et support : tutoriels en ligne, sessions de formation en direct et un support technique dédié pour répondre aux questions et résoudre les problèmes.
Services de visualisation et de collaboration : pour faciliter la communication et la collaboration entre les membres d’une équipe multi-sites, multi-projets de scan 3D, cela permet également aux utilisateurs de partager et de collaborer sur des modèles 3D en temps réel.
Passez en mode PoC
Quoi de mieux qu’un “PoC” pour s’assurer qu’on est sur le bon chemin et que la solution choisie est la plus adaptée aux besoins et au contexte de l’entreprise ?
Le PoC est une phase essentielle pour un projet, surtout lorsqu’il implique un changement d’usage, une évolution numérique, voire même une transition digitale.
Que le projet soit relativement simple à mettre en œuvre, ou qu’il soit, qui plus est complexe, il est primordial de tester en situation réelle, de confirmer, et de faire évoluer les attentes, de faire émerger de nouveaux besoins, tout en apportant une preuve concrète que ça marche, que ça fonctionne bien.
D’un point de vue stratégique, le PoC permet au porteur et à la direction, de prendre une décision plus éclairée et d’obtenir plus facilement une validation et un budget.
Le PoC permet de « growhacker » la chaîne décisionnelle, il accélère littéralement l’innovation en piratant le cycle décisionnel.
La démarche PoC est la méthode la plus sûre pour évoluer rapidement sans impacter votre activité.
Cette phase permet :
● d’évaluer les coûts ;
● d’affiner les besoins ;
● de vérifier la faisabilité et l’efficacité du projet ;
● d’estimer et limiter les potentiels risques.

🛠️ L’intérêt d’un PoC (Proof of Concept) est de pouvoir tester et vérifier la faisabilité d’une idée ; il permet de clarifier la vision projet et sécurise la mise en place pour plus de fiabilité et d’éfficacité.
Ça vous a plus ?
![]()
Partager cet l’Article
Pour aller plus loin 🔝 lisez notre article sur Le Jumeau Numérique – # 1 – # 2 – La Simulation 3D – # 1 – # 2